The care-providing robotic system FRIEND – Functional Robot arm with user-frIENdly interface for Disabled people – is a semi-autonomous robot designed to support disabled and elderly people in their daily life activities, such as preparing and serving a meal, or reintegration in professional life.
The care-providing robotic system FRIEND – Functional Robot arm with user-frIENdly interface for Disabled people – is a semi-autonomous robot designed to support disabled and elderly people in their daily life activities, such as preparing and serving a meal, or reintegration in professional life.
The robot FRIEND is the third generation of such robots developed at the Institute of Automation (IAT) of University of Bremen within different research projects. Within the last project, AMaRob, an interdisciplinary consortium consisting of technicians, designers, as well as therapists and other various interest groups, helped influence additional developments of FRIEND in order to develop a care-providing robot that is suitable for daily life activities. The AMaRob project was founded by the German Federal Ministry of Education and Research.
Schunk began participating in the AMaRob project in 2006, as one of a range of partners in development of the FRIEND, built from commercially-available, reliable industrial components. It is based on the wheelchair platform Nemo Vertical, which is an electric wheelchair from Meyra.
About a FRIEND
In order to function safely and effectively in a real, unstructured and clustered environment, rehabilitation robots require dexterous manipulators with at least seven joints (seven degrees of freedom) like a human arm. FRIEND II is equipped with such a dexterous lightweight robot arm – developed by AMTEC robotics GmbH with the functional specifications per the IAT to have human-like kinematics, being composed of a series of turn- and pan-joints with perpendicular axes, respectively.
The combination of a turn-pan-turn-joint is kinematically equivalent to a spherical joint like the human shoulder or the wrist joint, and the middle (the fourth) pan-joint corresponds to the elbow. The arm is mounted on a linear axis which allows it to drive in a specific home position and reduce visibility if it is not in use. At the wrist, a multi-axis force/torque sensor, model Gamma, from ATI-Industrial Automation, is integrated. This compact, light and robust monolithic transducer uses silicon strain gages, providing high noise immunity to sense forces and torques from all three directions – X, Y, and Z – of the tool frame. To process the strain gage information into digital CAN-Bus signals, a compact wrist mounted electronics unit has been developed.
According to Christopher Parlitz, manager service robotic, Schunk, “The robot arm/manipulator consists of the Light Weight Robotic Arm 3 (LWA3) from Schunk, requiring that the LWA3 offer redundancy – in order to handle objects in dynamic environments, and that it be light weight in order to optimize the design of the robotic system. Components from Schunk that are included in the overall design of the FRIEND are the LWA3 robotic manipulator as well as a two degrees of freedom pan-tilt head for camera gaze orientation.”
Additionally, the LWA3 manipulator from Schunk, which is mounted on the automated panning arm, needed to deliver the degrees of freedom required to park it behind the seat in order to navigate FRIEND in narrow passages. The arm of the FRIEND system uses the 24V power that is supplied by a standard Meyra wheelchair battery.
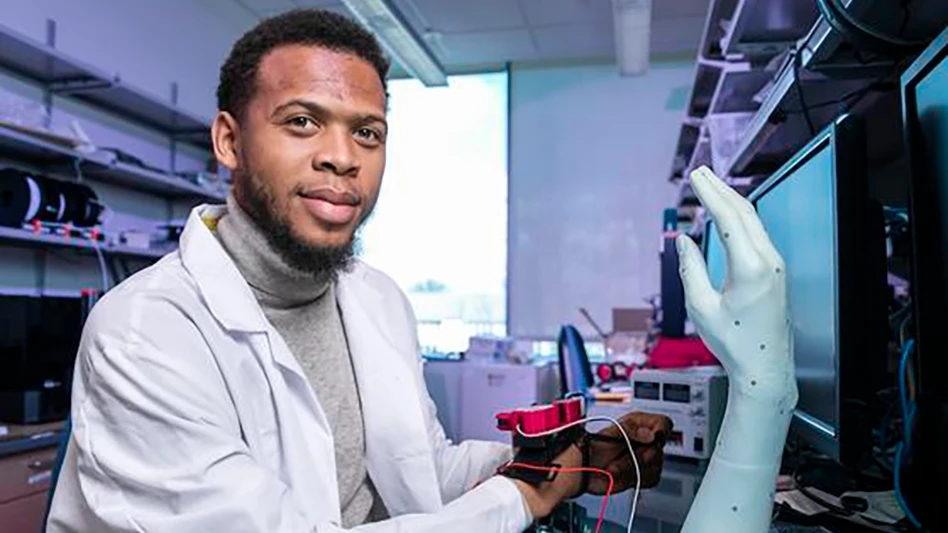
The robotic arm is equipped with the prosthetic hand, SensorHand Speed from Otto Bock, which has built-in slip sensors in order to detect the slipping of gripped objects and adapt force, accordingly. At the robot’s wrist, a force-torque sensor is mounted to perform force-torque-based reactive manipulative operations and to detect collisions.
 The FRIEND II is equipped with a dexterous lightweight robotic arm.
The FRIEND II is equipped with a dexterous lightweight robotic arm.
FRIEND Partners
While IAT at University of Bremem coordinated the project, together with the development of the reliable control methods, hardware enhancements, software enhancements, and the conception and realization of tests in ADL tasks, additional partners brought FRIEND to reality.
As previously mentioned, Schunk’s seven degrees of freedom lightweight manipulator mounted on the Friend II enables it to be manipulated through narrow environments or areas cluttered with obstacles. Overall, Schunk contributed the development of a small manipulator wrist, integration of a force torque sensor into the wrist, and development of a manipulator body that is able to be disinfected as needed.
Otto Bock began cooperative work with IAT because of its field of research and development of prostheses for disabled users. Within the original work, Otto Bock developed a hand prosthesis with grip force and anti-slipping control that was mounted to the end-effectors of the system’s manipulator. Current work with the FRIEND includes improvements to the sensor-based hand prosthesis to ease the usage of the manipulator gripper; validation of the systems usability within the support scenarios; adaptation of the gripper control to offer an interface to the manipulator; and development and realization of modifications that become necessary.
IGEL – Electronic Communication Assistance Systems helps enable people with disabilities, through the use of state-of-the-art computer systems, by developing and distributing electronic communication assistance and environment control systems. In the FRIEND project, IGEL delivers basic research on environment control systems used within intelligent environments; development and realization of new methods within environment control systems; and analysis to improve reliability and easy maintainability of rehabilitation robotic systems and environment control systems.
A neurological rehabilitation center for children, teenagers, and young adults with craniocerebral injury or other brain afflictions, Friedehorst’s work in the project enables definition and detailed planning of support scenarios; realization of system tests with handicapped users; and development of methods to prove the usability of the overall FRIEND system.
Another partner, :i/i/d – Institute of Integrated Design, is part of the college of art and works interdisciplinary in the fields of planning and design of innovative products, services, and communication processes. Work by :i/i/d with the AMaRob project delivers user orientated design; research on the needs of users; product design and user interface design; detailed planning and preparation of the demonstrator realization; and iterative design process.
IMTS Exhibit
An example of Schunk’s contribution to the FRIEND project, Schunk’s lightweight arm LWA3, is being displayed in Today’s Medical Development’s booth at IMTS 2010, booth W-100.
Schunk’s PRL servo-electric rotary actuator enables the creation of reconfigurable modular robot structures. The individual PRL modules can be assembled with complete freedom and flexibility, using connecting parts to product an individual lightweight arm. The rotary actuator is set in motion by a brushless servo-motor with harmonic drive transmission, already incorporated with the complete power and control electronics. It is capable of positioning moves with ramp control and features monitoring of the end positions, voltage, current, and temperature. Through the use of lightweight, high-strength materials, the compact rotary actuators achieve a weight/payload ratio exceeding 2:1.
An end-effector to the lightweight arm is the SAH anthropomorphic hand developed by Schunk, in cooperation with the DLR, the German Aerospace Center, and the Harbin Institute of Technology (HIT). The dexterity of the SAH is similar to the human model, but it is also distinguished from existing solutions by its esthetically-pleasing appearance, which bears a close resemblance to the human hand. Each of the fingers has four joints, and it is equipped with sensors to determine the force and position values for each joint. Besides a good grip, the SAH also has the sensitive touch that is often needed to open bottles as well as to grip a raw egg.
IMTS Booth W-2000
Schunk Inc.
Morrisville, NC
schunk.com
 Advancing Medical Simulation
Advancing Medical Simulation
Laparoscopic surgery is used more often for surgeries that used to require large incisions and longer recovery times. So one has to wonder how surgeons hone their skills so quickly and precisely as more surgeries turn to laparoscopic procedures.
One way is through the use of Simbionix U.S.A. Corp.’s virtual reality simulation products and solutions for clinical education and training of medical professionals. Simbionix, established in 1997, first developed the GI Mentor, and since then, has launched a complete line of medical simulators that provide medical professionals with hands-on training in an array of Minimally Invasive Surgery (MIS) procedures.
Astro Manufacturing & Design, a full-service, five-division, multi-capability manufacturing company headquartered in Eastlake, OH, has been providing manufacturing services to Simbionix since early 2004. This work includes manufacturing of all fabricated parts, computer assembly, total system assembly, and system testing; the loading and configuration of operating system, device drivers, and application software to the system computer; testing and calibration of all manufactured systems; and manufacturing of system sub-assemblies which include stent deployment devices, laparoscopic handles, and cameras.
Astro will display a Simbionix system in Today’s Medical Development’s Booth W-100 during IMTS 2010. Attendees visiting the booth will be able to put their skills to the test by attempting one of the pre-loaded laparoscopic surgeries on the system.
IMTS Booth W-100
Astro Mfg. & Design Simbionix U.S.A. Corp.
Eastlake, OH Cleveland, OH
astromfg.com simbionix.com
Explore the August 2010 Issue
Check out more from this issue and find your next story to read.
Latest from Today's Medical Developments
- Gore completes acquisition of Conformal Medical
- Medical textiles designed for cardiovascular, orthopedic, dental prosthetic applications
- Micro-precision 3D printing: Trends and breakthroughs in medical device manufacturing
- One-component, dual-cure adhesive system for medical device assembly
- #82 Manufacturing Matters - Forecasting 2026 with GIE Media's Manufacturing Group
- Flexing prosthetic finger offers lifelike appearance and movement
- How the fast-evolving defense market impacts suppliers
- Medtronic’s Hugo robotic-assisted surgery system makes US debut