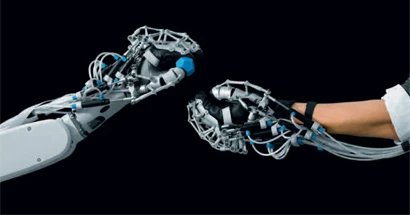
New scope for interaction between humans and machines The ExoHand from Festo is an exoskeleton that can be worn like a glove. The fingers can be actively moved and their strength amplified; the operator’s hand movements are registered and transmitted to the robotic hand in real time.
The exoskeletal hand has all the principal physiological degrees of freedom of its human counterpart. It thus supports the human hand’s diverse techniques for grasping and handling objects.
The objectives are to enhance the strength and endurance of the human hand, to extend humans’ scope of action and to secure them an independent lifestyle even at an advanced age.
Robotics Meets Orthotics
Since all the joints and their drive units are located outside the actual hand in the form of the exoskeleton, this manual orthosis can be fitted not only over the human hand, but also over an artificial hand made of silicone. Using the same hardware, this enables a scenario that creates a link between robotics and orthotics in a completely new way.
The ExoHand combines human intelligence with the capabilities of a robot. While machines are precise, robust, and powerful, their responses to complex situations are limited. They normally rely on the visual and tactile perception and decision-making capacity of a human operator.
From Assembly to Medical Therapy
The practical benefits for Festo lie in extending the scope of human-machine cooperation for automation technology with the addition of expertise in the fields of remote manipulation and force amplification.
In this form of direct human-machine interaction, the ExoHand represents a possible technical solution to the challenges that will be faced by production and working environments of the future – both real and virtual. The medical advantages, along with an immense interest in assistance systems for automation technology, have motivated the engineers from Festo to enter into a collaboration with the Tübingen University Hospital as part of the Bionic Learning Network.
Force Amplification in Assembly
With the ExoHand, Festo is supporting its customers in the development of innovative solutions for human-machine interaction. Despite the high degree of automation in industry, there are still a large number of activities in assembly that can only be performed by the human operator. These include numerous repetitive tasks that easily lead to fatigue. This type of activity represents a challenge, especially to older workers.
In most industrialized countries, the average age of the workforce will continue to rise over the coming years. The ExoHand thus represents a technological solution that meets the challenge of demographic change in the world of production.
The system amplifies the strength of the human hand and helps employees remain in the work process for a longer time without suffering permanent physical effects. To prevent fatigue, the ExoHand can be worn for activities carried out in the assembly process, thereby functioning as an assistance system that makes for more pleasant working conditions in the assembly environment.
Force Feedback for Safe Remote Manipulation
When the ExoHand is used for remote manipulation of a robotic hand in an industrial setting, complex tasks in dangerous or hazardous environments for example can be performed from a safe distance. As a force feedback system, the artificial hand can greatly extend the human operator’s scope of activity in a production environment. In this scenario, the ExoHand is fitted over both the human hand and an artificial hand of silicone. It thus simultaneously functions both as the operator interface and a robotic hand. The entire artificial hand can therefore be addressed with practically all relevant degrees of freedom.
This allows forces to be transferred from a different environment to the operator’s own hand in the form of force feedback; the operator has the sensation of feeling the shape of the remote object. The human sense of touch can thus be implemented over long distances and can even be applied at the interface of the real to the virtual world. The operator need no longer rely merely on his or her visual and acoustic perception, but can actually feel forms and resistances or the effects of applied forces.
Potential for the Field of Service Robotics
In addition to industrial robotics, the ExoHand is especially suited to the service robot market, which will be characterized by rapid growth in the coming years – after all, new concepts in materials, sensors and drives have the potential to revolutionize this market. If, for example, a robot is to maintain its orientation in an everyday domestic environment in combination with the ExoHand and interact with humans in a variety of everyday situations, the human-like characteristics of the robot will be even more essential than in the production environment.
With its newly developed ExoHand, Festo is thus incorporating a drive concept based on pneumatics: the eight pneumatic actuators make for precise movement while at the same time lending the ExoHand excellent properties in terms of yielding capacity and thus also of safety. However, whether the service robot will find its way into our living rooms will also depend largely on cost developments. Festo’s ExoHand consists of components from Festo that are already produced in large quantities and are therefore available on the market at relatively low cost.
Use in Medical Therapy
In rehabilitation, the ExoHand can be used as an active manual orthosis. In Germany alone, some 150,000 people annually suffer a stroke for the first time; many of these patients must learn to use their hands once more.
Together with a brain-computer interface (BCI), the ExoHand from Festo allows a closed feedback loop to be established. The active manual orthosis can help stroke patients suffering from paralysis to regenerate the damaged connection from the brain to the hand. The stroke patient’s wish to open or close his or her hand is recorded by means of an electroencephalographic signal (EEG) that is measured on the subject’s head.
The movements are carried out by the active manual orthosis. This gives rise to a training effect, which over the course of time enables patients to move their hands once more without technical assistance. With a passive manual orthosis, the chronically bent fingers of a hand are merely straightened by means of a spring; but with the ExoHand, the pneumatic cylinders actively move the patient’s fingers.
The development of such a project calls for expertise in various fields of automation technology. Mechatronics and generative manufacturing technologies are playing an important role in the realization of the ExoHand.
Mechatronics: Uniting Several Technologies
Mechatronics, a core competence of Festo, combines the traditional disciplines of mechanical, electrical and computer engineering; the objectives are to improve the functionality of technical systems and gain new insights into various aspects of human-machine cooperation. The software used allows functional integration within the system and thus paves the way for intelligent human-machine interaction.
Tailor-Made: Generative Manufacturing for a Perfect Fit
The ExoHand, which is customized to fit the hand of the individual user, is manufactured from polyamide in the selective laser sintering (SLS) process. For this purpose, the exoskeleton is produced based on a 3D scan of the user’s hand.
Pneumatics: Movement Through Almost All Degrees of Freedom
The eight double-acting pneumatic actuators – DFK-10 cylinders from Festo – that are attached to the structure of the exoskeleton allow the wearer to open and close the fingers of the orthosis with utmost precision. The index finger can also be pivoted to either side, and the thumb can be rotated towards the palm just like its human model.
Precise Position Detection and Efficient Use of Compressed Air
Linear potentiometers register both the positions of the fingers and the force applied by each individual drive unit. The corresponding pressure in the various chambers is regulated by means of piezo proportional valves. Pressure sensors on the valve terminal serve to regulate the pressure and give an indication of the forces exerted by the cylinder.
Precise Positional Control with CoDeSys
A CoDeSys-compliant controller registers and processes the positional and force parameters. It regulates the pressures in the cylinders, in order to ensure the correct finger positions and forces. Non-linear control algorithms are used for this purpose.
A Driving Force of Innovation: Creative Solutions for New Markets
Festo supplies both components and expertise: with this broad basis of expertise in technology and research, Festo enables its customers to develop systems and robots that can play an important role in human-machine cooperation.
This involves the questions of how humans and machines can interact more efficiently in view of the extended possibilities of state-of-the-art technologies, and what demands production must meet in the future. For this purpose, systems and environments such as the ExoHand are created which extend the human operator’s scope of action by active support to meet specific requirements. Festo can draw on the insights that have been gained in this field with the Bionic Handling Assistant.
Watch the video: http://youtu.be/EcTL7Hig8h4
Latest from Today's Medical Developments
- Medtronic plans to expand interventional cardiology portfolio with CathWorks acquisition
- Nikon releases latest update to dimensional measurement software
- US cutting tool orders reach $206.1 million in November 2025
- Greenland is a vital link in the global supply chain
- What’s happening in the defense industry right now
- Hypertherm accepting applications for educational grant program
- Making workholding work for you
- Norman Noble offers medical implant engineering design services