NeuroRobotics is a new category of non-invasive medical device technology developed to help individuals relearn how to move partially paralyzed limbs without requiring electrical stimulation or surgical procedures of any kind.
NeuroRobotics is designed to enable individuals to self-initiate and control movement of affected muscles using their own biological signals. With this capability, non-invasive NeuroRobotics simultaneously engages and reinforces both neurological and motor pathways.
The goal is that through repetitive training that reinforces normal movement patterns, people who have suffered a neurological injury may improve mobility without wearing the device and in some cases, it has been effective, no matter how long ago the injury occurred.
Myomo’s NeuroRobotics platform technology serves as a reusable building block for the development of new Myomo products and expanded indications. In development since 2002, NeuroRobotics was pioneered by Myomo co-founders through MIT research and collaboration with prominent medical experts affiliated with Harvard Medical School.
Platform Technology
NeuroRobotics is Myomo’s patent-pending platform technology. Designed as a feedback-based, closed loop system, NeuroRobotics facilitates muscle re-education by both amplifying and rewarding a patient with desired motion in concert with his or her own muscular activation.
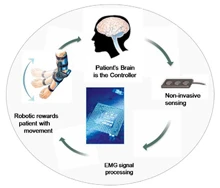
Key system components include: surface electromyography (EMG) sensing, system software, and wearable, portable robotic devices. Since movement is initiated and continuously controlled by an individual’s residual muscle activity, the person’s brain functions as the system controller. With this capability, patients have an opportunity to stop, in real time, during execution of a targeted training task, to evaluate performance and re-adjust positioning, as they train toward muscle re-education. The goal is that through repetition and practice, patients will relearn and achieve more normative movement patterns.
How it Works
- Patient’s brain is the controller: When a patient attempts movement during therapy, their muscles contract and electrical muscle activity signals fire
- Non-invasive sensing: An EMG sensor sits on the skin’s surface to detect and continuously monitor a person’s residual electrical muscle activity
- Proprietary system software: Advanced signal processing software filters and processes the user’s EMG signal, and then forwards the data to a robotic device
- Proportional assistance: Portable, wearable robotics use the person’s EMG signal to assist with desired movement; power assistance is customized to patient ability with Myomo’s real-time adjustable control unit
Feedback-Based Training
When a person moves his or her muscle, it can create a somatosensory – relating to the perception of sensory stimuli from the skin and internal organs – feedback signal that not only tells the brain where the limb is, but also helps tune the connections between the somatosensory systems and the motor system. This interplay is constantly adjusted every time a person moves a muscle.
NeuroRobotics is designed to maximize this interchange by adjusting to a person’s body and using an individual’s own electrical muscle activity signal, although it may be very small and weak, to control movement of a hemiparetic limb.
NeuroRobotics is designed to engage the central nervous system into the control loop, through a combination of proprioceptive – unconscious perception of movement and spatial orientation arising from stimuli within the body itself – tactile, and visual sensory feedback. With this capability, patients can accomplish motion control with NeuroRobotics acting as a feedback-based, closed-loop strength amplifier.
Adjustable Power Assistance
NeuroRobotics helps individuals relearn how to move severely weak or partially paralyzed limbs by facilitating their capacity to perform therapeutic exercises that they otherwise might not be able to do. Through EMG (electromyography)-controlled robotic capabilities, Myomo’s advanced technology helps patients achieve desired movement by amplifying the patient-controlled movement. The technology’s real-time adjustable assistance parameters allow therapists to customize the amount of assistance to patient skill level.
By assisting a person’s ability to practice desired movements with affected limbs, NeuroRobotics offers individuals the opportunity to benefit from research demonstrating that highly repetitive exercise may facilitate muscle re-education with concomitant improved motor abilities.
Wearable, portable NeuroRobotic devices may also facilitate interventions, such as Constraint Induced Motion Therapy (CIMT), which suggest that stroke survivors may relearn to use the weakened side through “forced training” of the affected limb.
Latest from Today's Medical Developments
- Exchangeable-head solid carbide cutting tools
- NextDent 300 MultiJet printer delivers a “Coming of Age for Digital Dentistry” at Evolution Dental Solutions
- Get recognized for bringing manufacturing back to North America
- Adaptive Coolant Flow improves energy efficiency
- VOLTAS opens coworking space for medical device manufacturers
- MEMS accelerometer for medical implants, wearables
- The compact, complex capabilities of photochemical etching
- Moticont introduces compact, linear voice coil motor